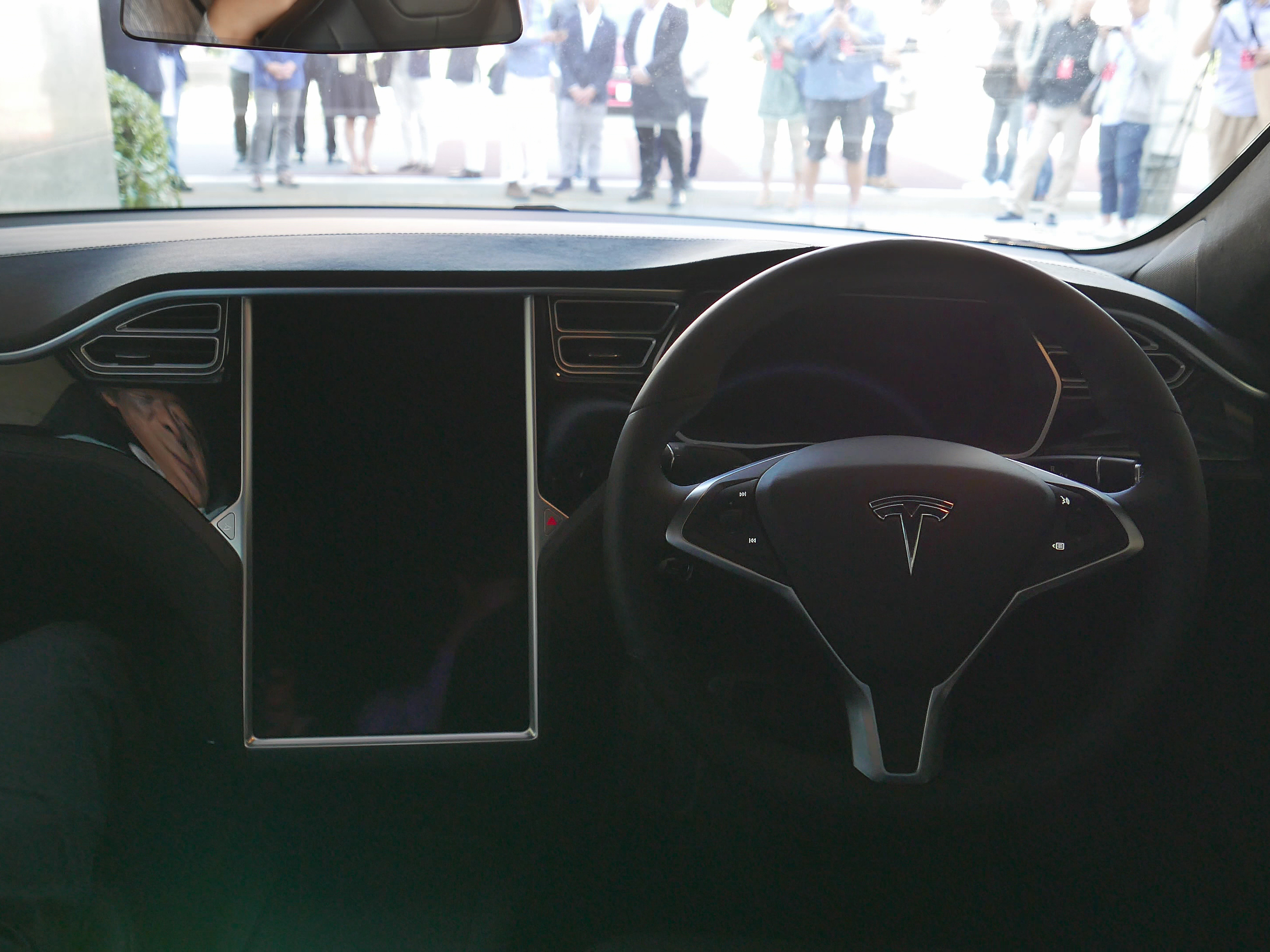
今度は、サモン作動中のコクピットの模様を連続写真と動画で見てみましょう。

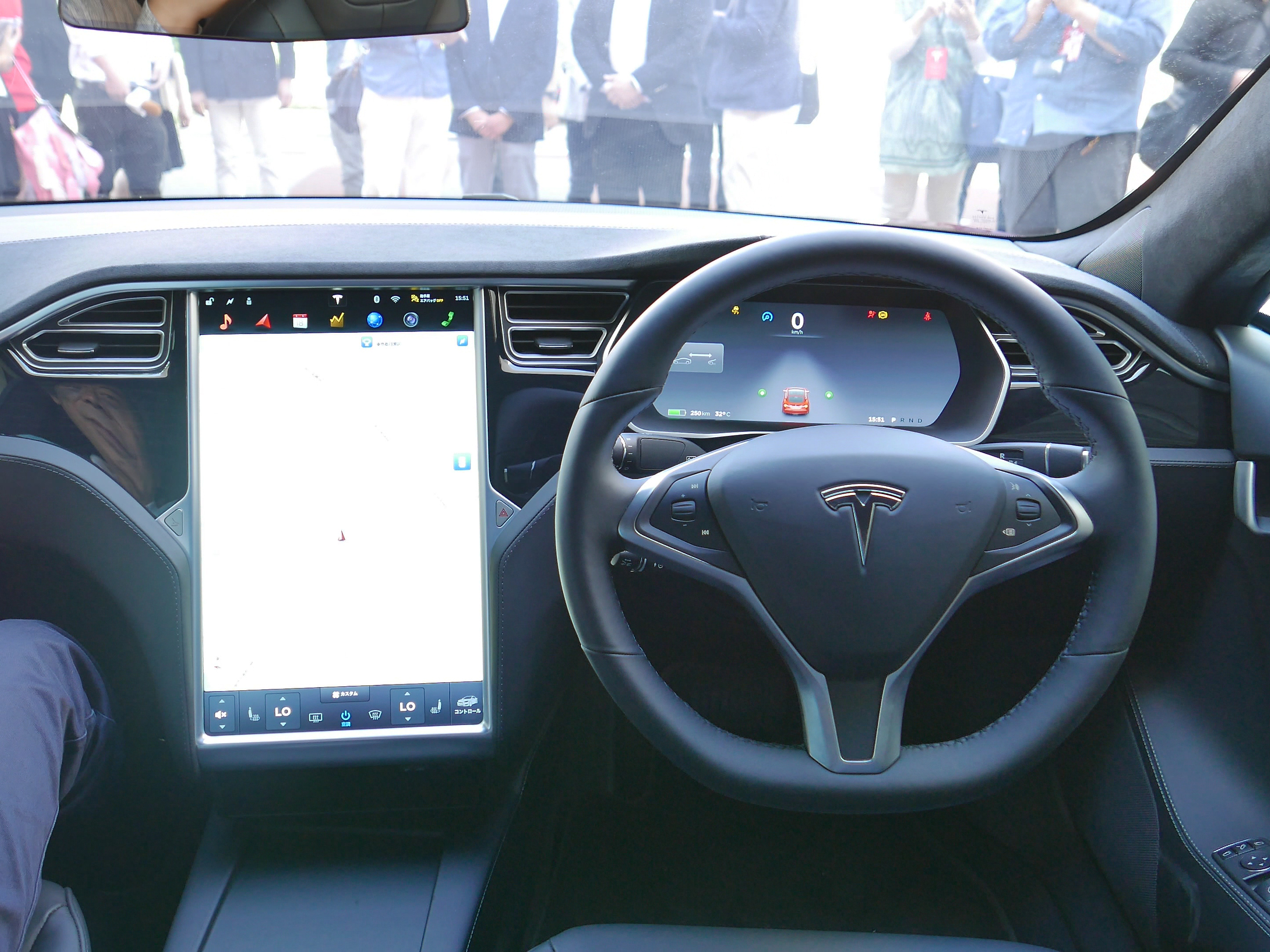
スマホからの“指令”を受けるまでは、メーターとセンターコンソールの両パネルは真っ暗

スマホを介してオーナーからの指令が!まずは正面のメーターが点灯

続いてセンターコンソールのモニターが点灯

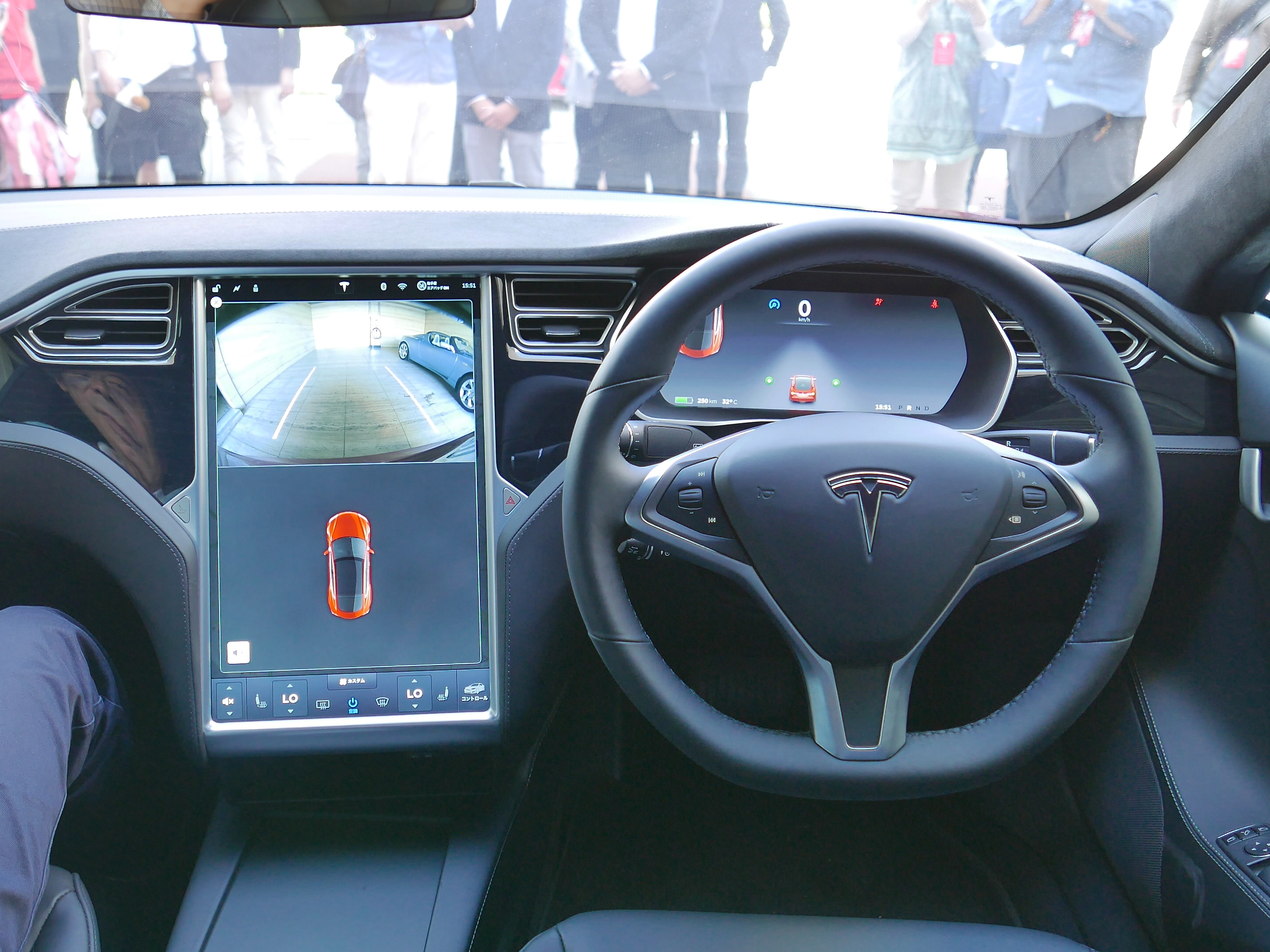
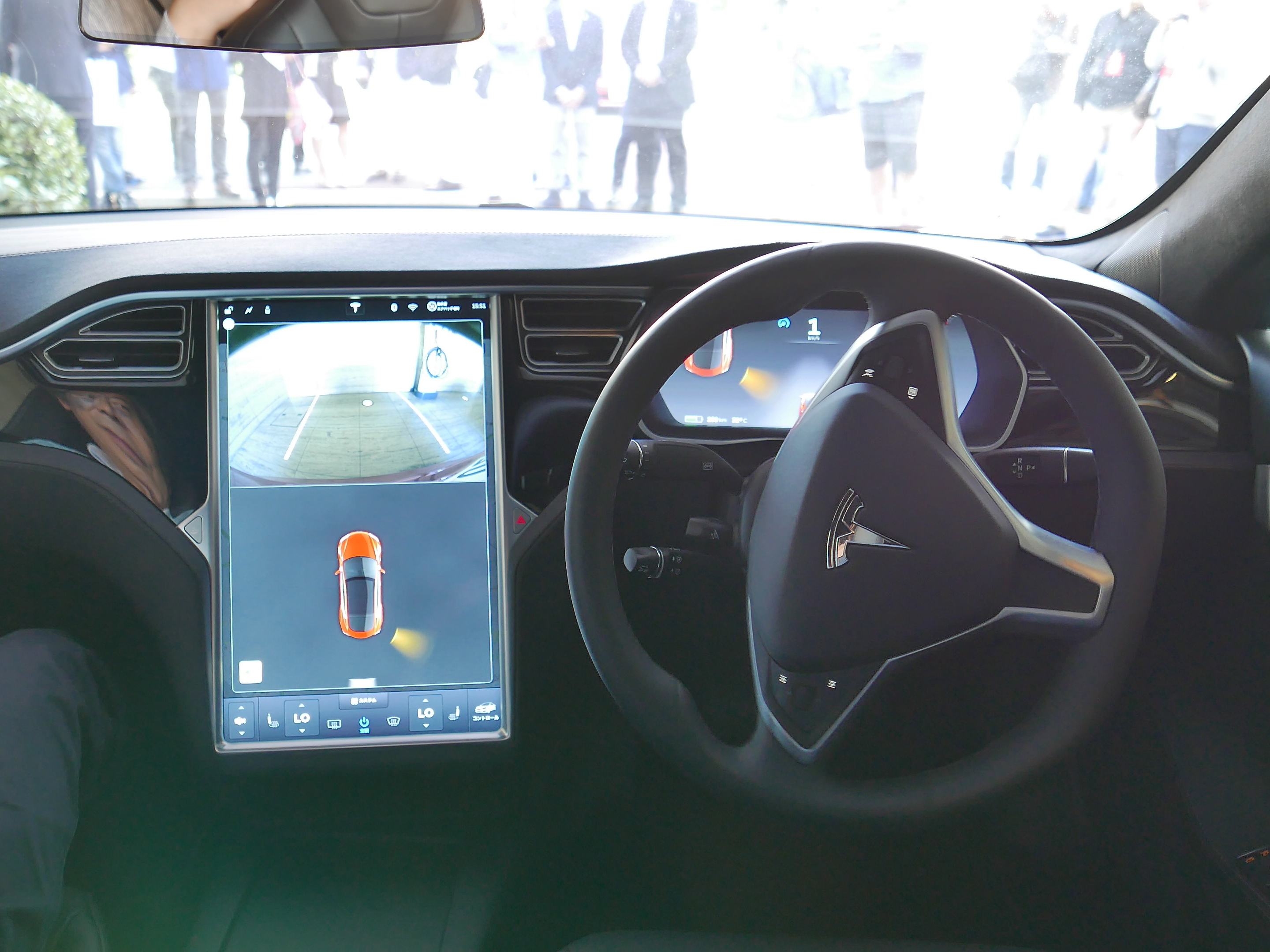
センターコンソールのモニターに後方の映像と俯瞰図が現れる

センサーで後方を検知しつつゆっくりバック

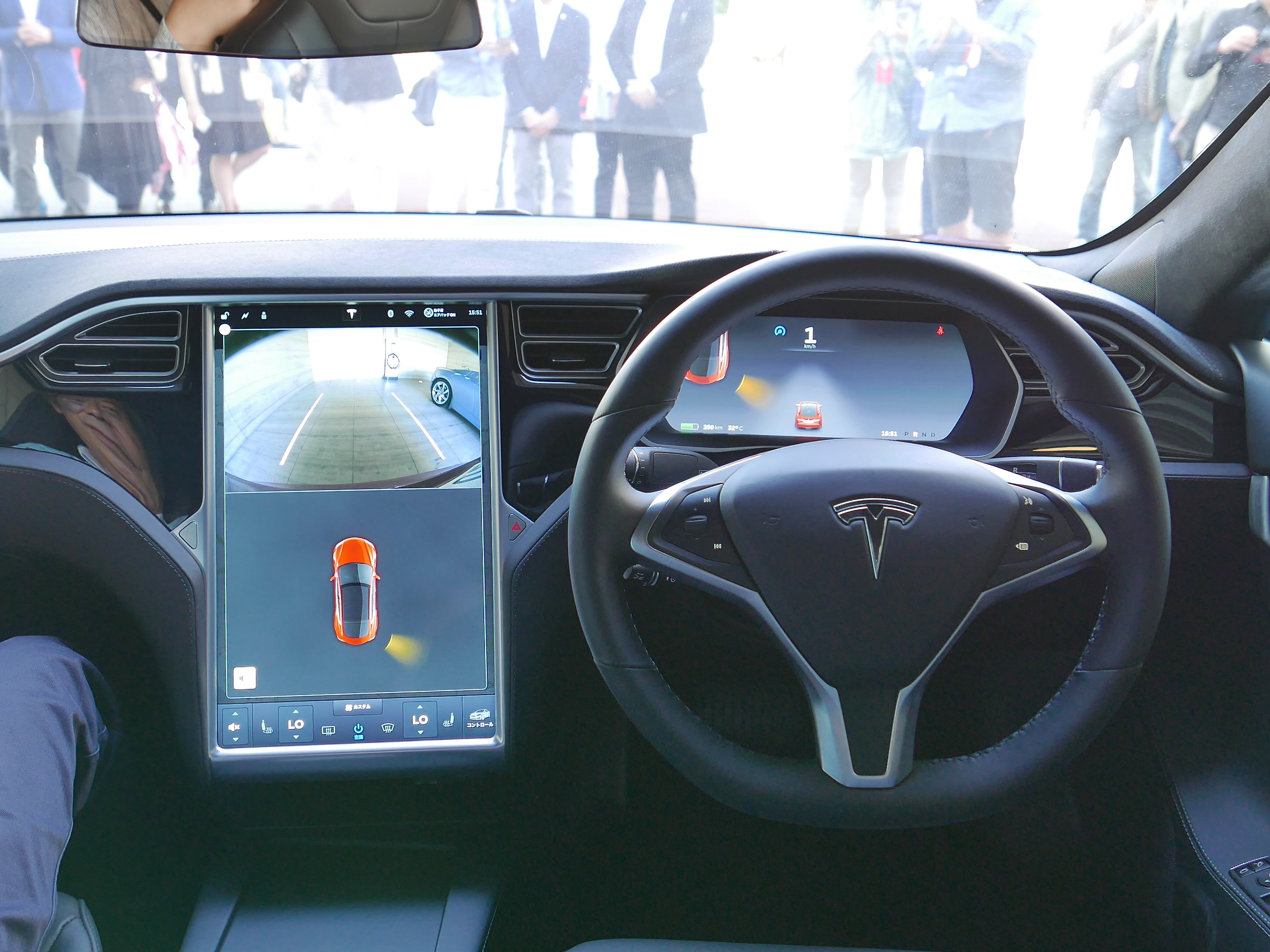
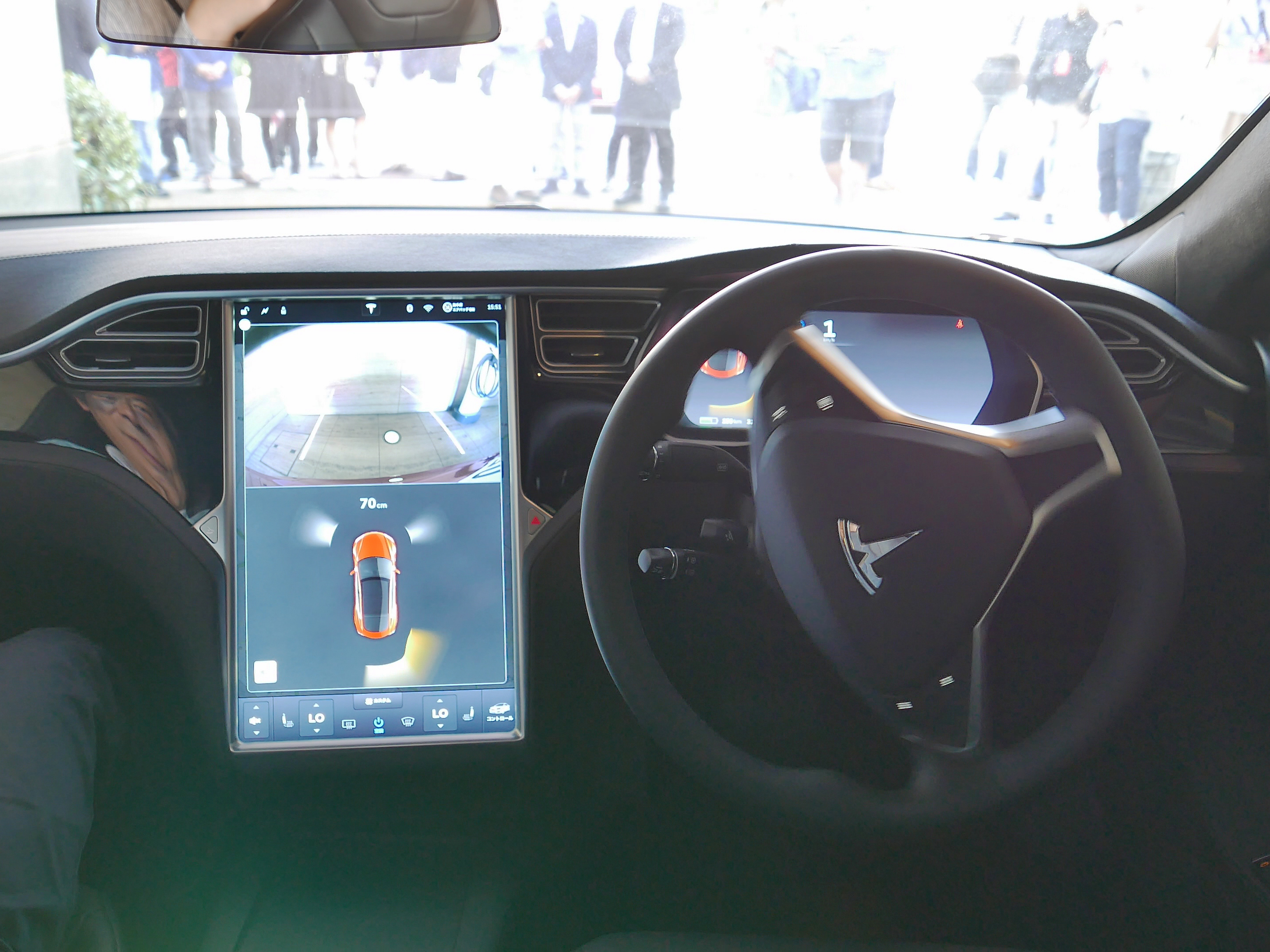
右後方に障害物を検知。自動でハンドルを左に切る

ハンドルの舵角が自動で大きくなる

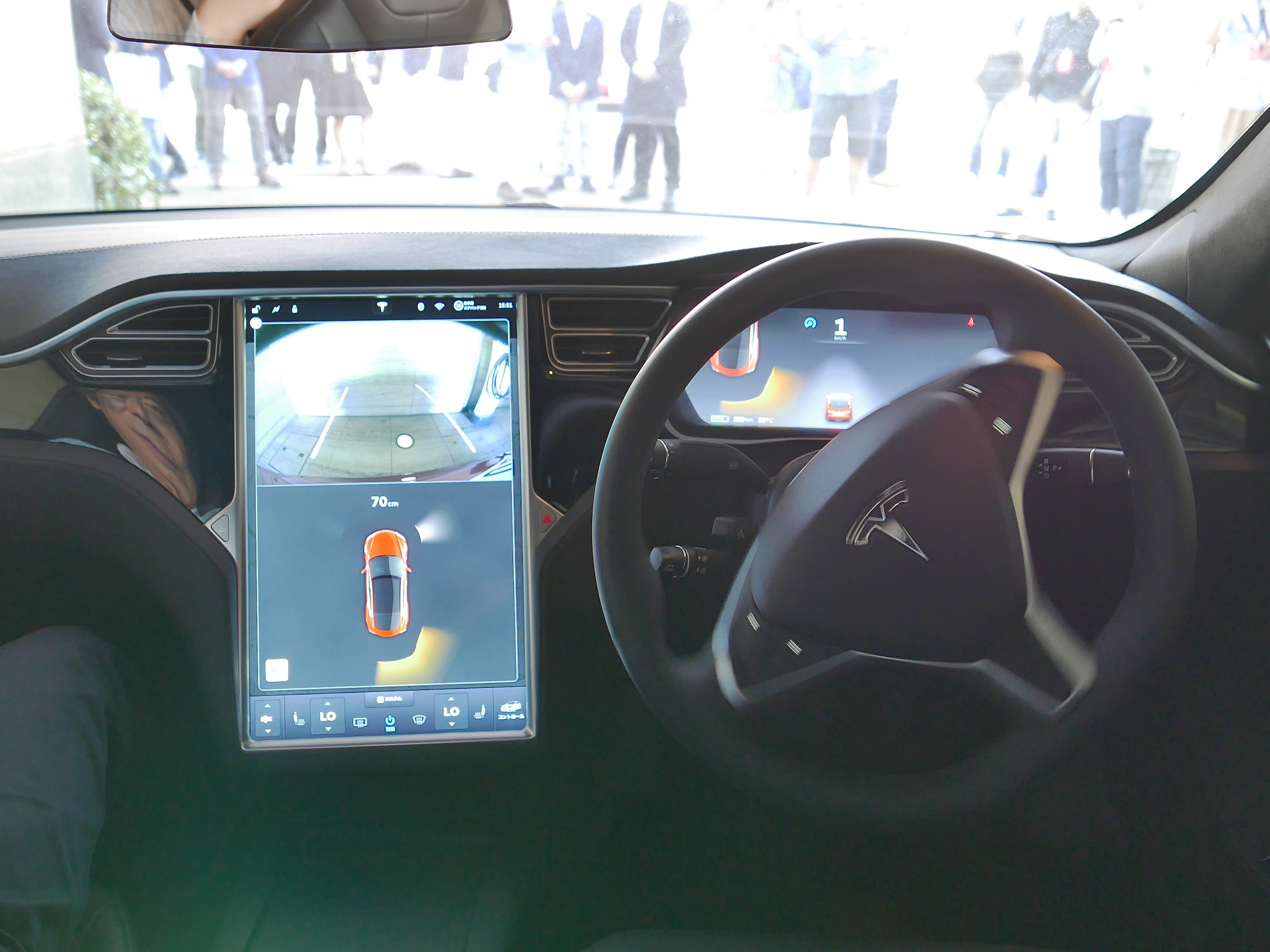
障害物をよけるため、さらに大きくハンドルを切る

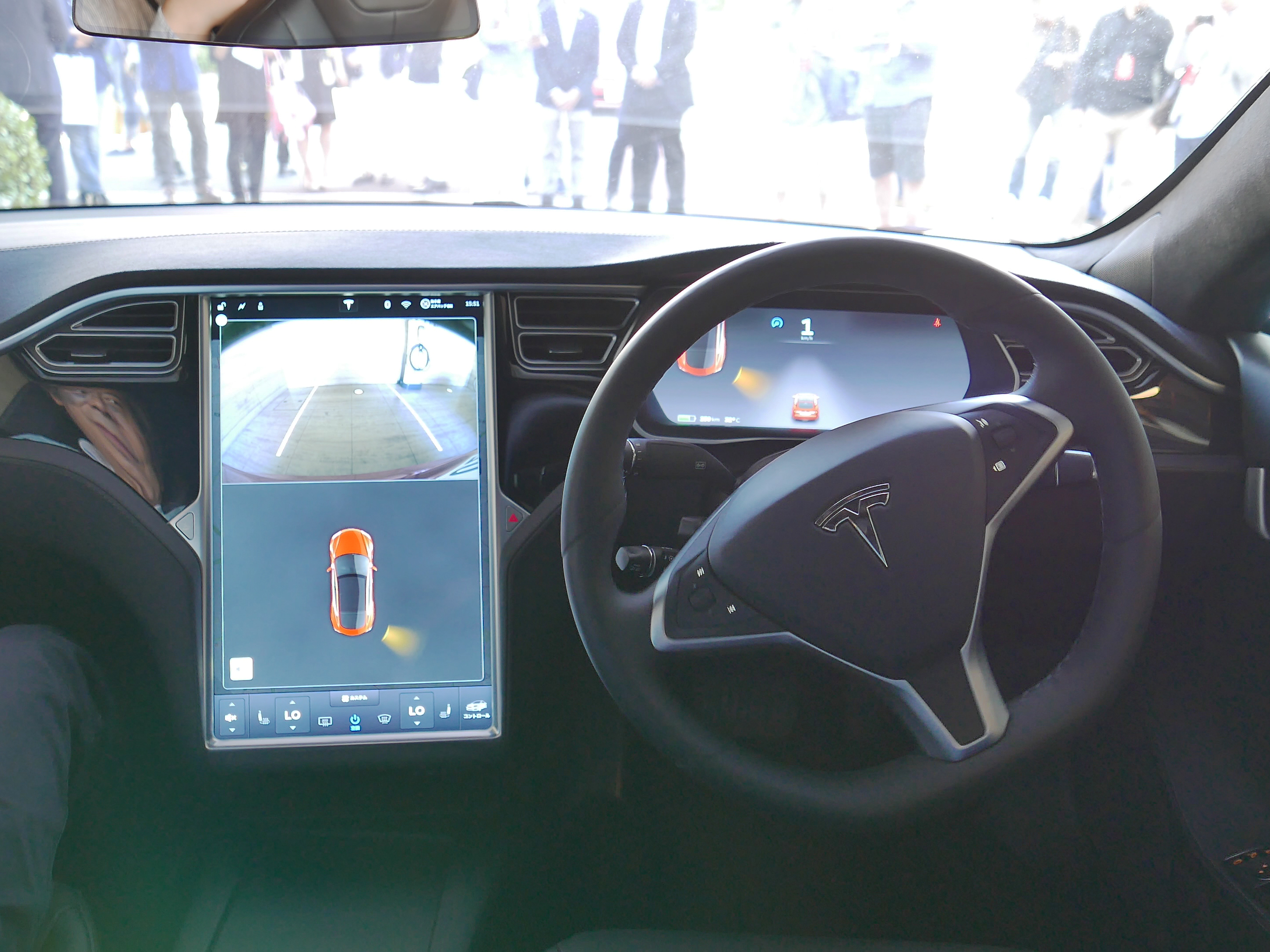
後方にある壁との距離を測りながらゆっくりバック。ハンドルの舵角を微調整

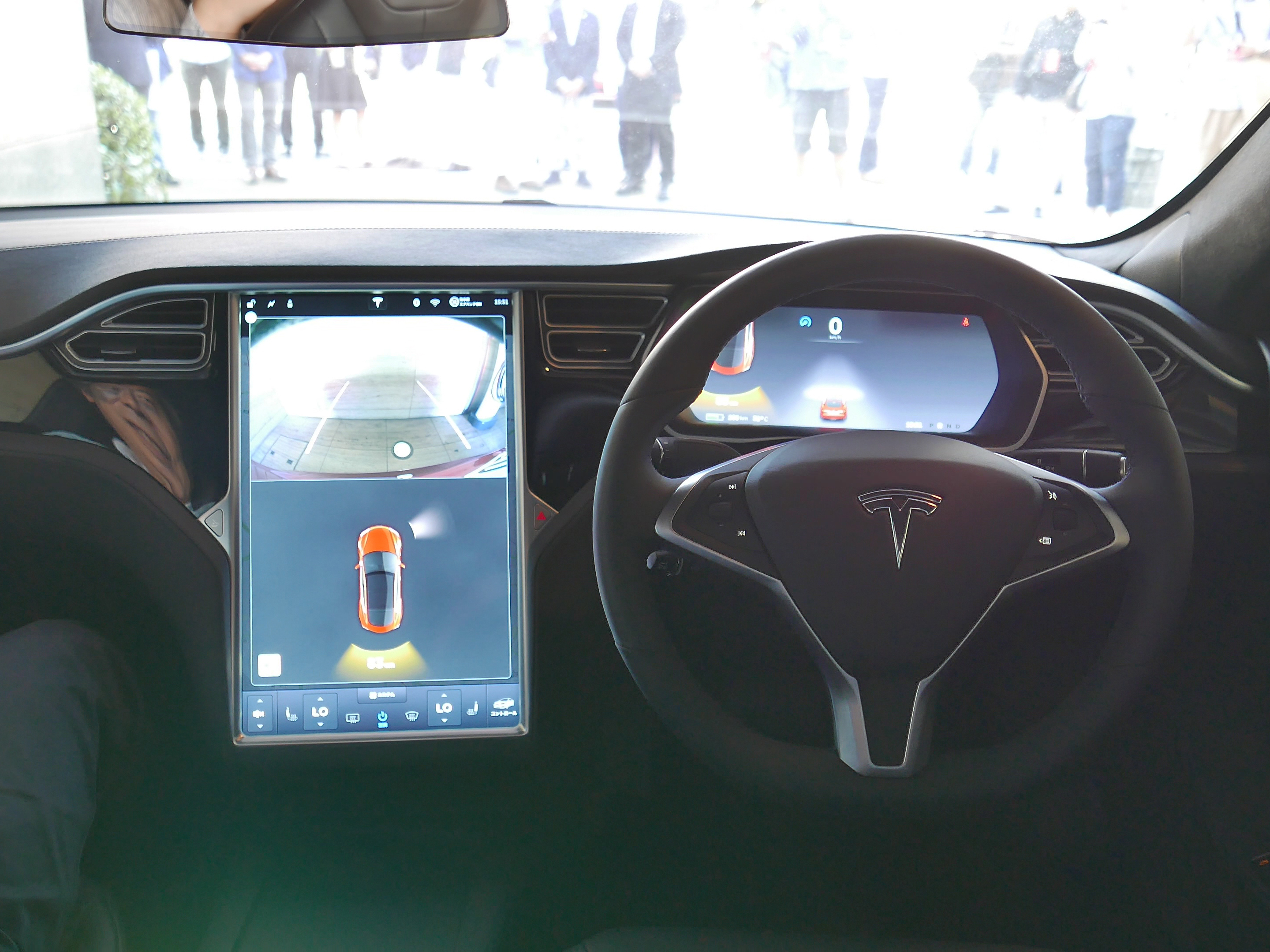
最後は、ゆっくりとちょうどいい位置までバックして停車

停車して自動でメインスイッチが落ちる
<動画はコチラ>
で、使ってみての感想は、あまりに簡単過ぎて、新しい技術を使ったという達成感、ユーザー体験としての新鮮さが若干薄め。
アプリのUIは実にシンプルで、後進(もしくは前進)のボタンにタッチするだけ。運転席に誰も座っていないモデルSは、センサーが検知した障害物を細かくステアリング調整しつつよけながら、思っていたよりもずっとスムーズに車庫に収まってみせたのでした。
なおサモンの利用には、GPSを補足できること、携帯電話の3G通信エリア内であること、といった条件こそありますが、これなら、誰でも使いこなせるな、というのが実感。すでに2016年1月から北米では導入されてきた実績がありますし、日本国内でもテストを重ね、国土交通省の承認も得ているそうです。